Amazon Picking Challenge 2016のPick Task部門で第2位を獲得しました
Preferred Networksのメンバで構成されたチームPFNは、ライプツィヒで6/29-7/3に行われましたAmazon Picking Challenge 2016に参加し、”pick task”で第2位(1位とは同スコア)を獲得、また”stow task”では第4位となりました。

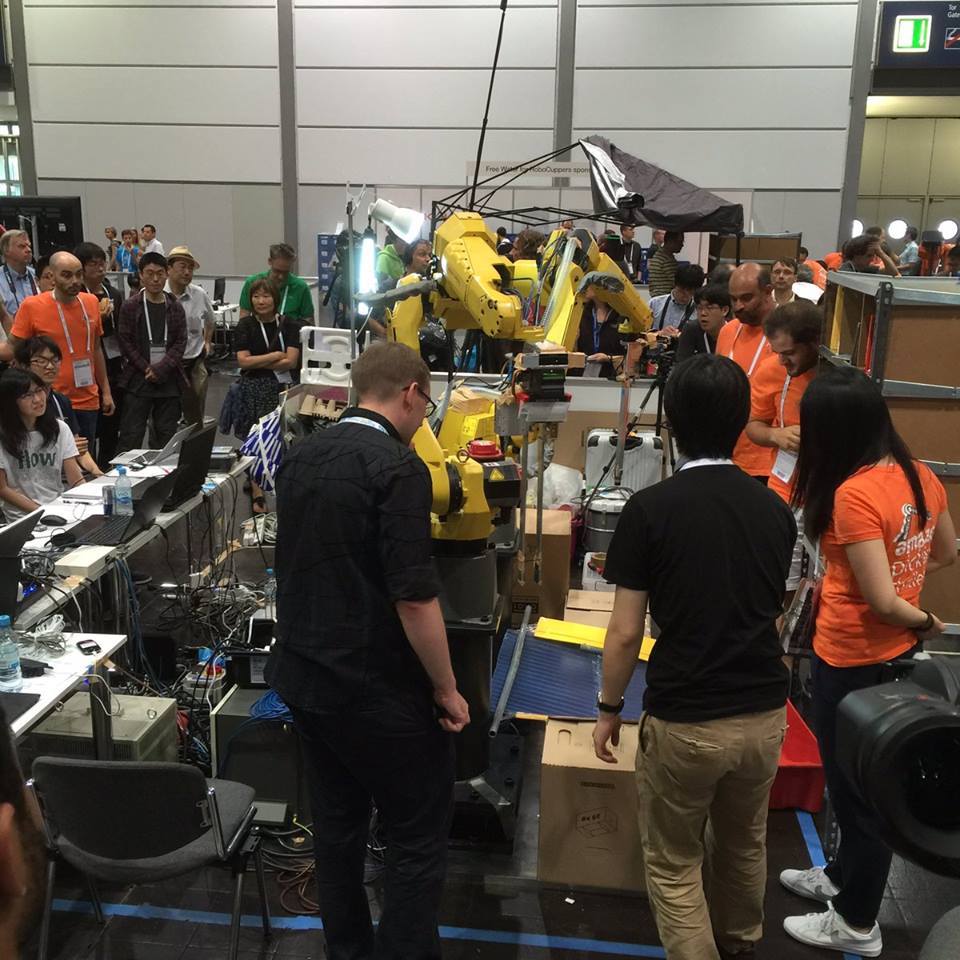
Amazon Picking Challenge (http://amazonpickingchallenge.org/) は、2つのタスクに分かれ、”pick task”は棚の各ボックスに入れられた46のアイテムから決められた12アイテムを取り出すことを競い、”stow task”は1つの箱に入れられた12のアイテムを取出し、すでに34のアイテムが入った棚に格納することを競います。またこれらのタスクにおいてロボットは自律的に動き、人間は何も操作を行うことはできず、物体判別や物体の状態認識、モーションプランニング、物体把持プランニングが要求されます。
PFNチームは、自社で開発したOSSであるChainerを使ったディープラーニングを利用して、カメラセンサからの画像や3Dマップを入力として物体認識とその物体に対する最適なアプローチ位置を割り出しています。FANUCの6軸ロボットアームを2つ使用し、それぞれ吸引と把持を行う異なる仕様のエンドエフェクタをハンドメイドで開発して接続しています。またロボットの自律的なモーション制御も我々で開発し、本システムを3か月という短い期間で構築し、世界の強豪を上回る結果を残すことができました。
今回の成果は、産業IoTやロボティクスの高度化において、非常に重要なものであると考えております。